To test out some of the capabilities of the Gopro Hero Max 360 camera one of the lab managers at Innovate Labs took the camera out on a little adventure. Utilizing the 360 video from the camera gives the user the ability to alter the perspective and angle in post processing, allowing a lot of flexibility in the footage retrieved and final product.
Projects
3D Printed Playdoh Remover Prototype


Learn About Octoprint Installation at the OPIM Innovate Lab
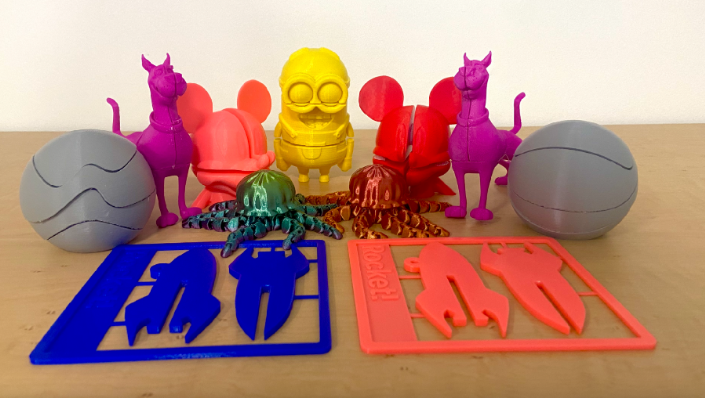
 What started out as a simple way to monitor our 3D prints turned into a full blown remote control system for our Prusa i3 MK3s! This setup produces stunning timelapses that make the print look like it is rising from the print bed on its own.
What started out as a simple way to monitor our 3D prints turned into a full blown remote control system for our Prusa i3 MK3s! This setup produces stunning timelapses that make the print look like it is rising from the print bed on its own.
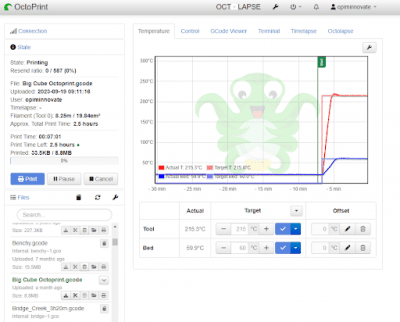
So how does it work? One of our lab assistants, Jason Tyler, who spearheaded the project, explains, “It all starts with the Raspberry Pi, which is a mini computer that serves as the brains of the system. This computer is connected to both the printer and the camera that we have watching the prints. It runs a special operating system that connects to our network and has a bunch of special features that makes this project possible.”
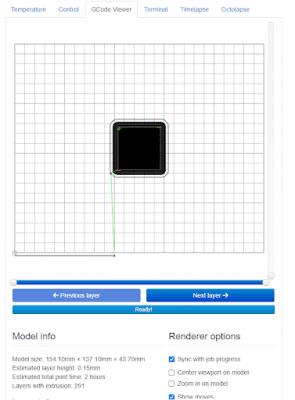
In essence, after each layer printed the software talks to the printer and tells it to move the extruder (the big printer head that does the ‘printing’) out of the way, then tells the camera to take a picture. This is done using the GCode language, which is the universal programming language of most 3D printers. When compiled at the end, the pictures are stitched together into a seamless video.
Videos aren’t the only thing that Octoprint can do, Jason says. “The Octopi software allows us to start new prints, monitor current print status, and view prints layer by layer from anywhere!. There is a plugin store where the community has uploaded a bunch of add ons for Octoprint that give this project an extensive amount of possibilities.”
Having a system like this fits in perfectly at OPIM Innovate: It provides a glimpse into some real world skills and projects students might not encounter elsewhere. Octoprint essentially acts as a load/supply management system that increases operational efficiency; similar to examples in the manufacturing industry. Students can view real-time analytics and optimize their print settings from the cloud!
If you are following us on Tiktok or Instagram you may have seen some of these videos before. Come by the lab from 9-4 Monday to Friday to see Octoprint in action!
3D Printed Marceline’s Bass Ax from Adventure Time


Reinvent PT
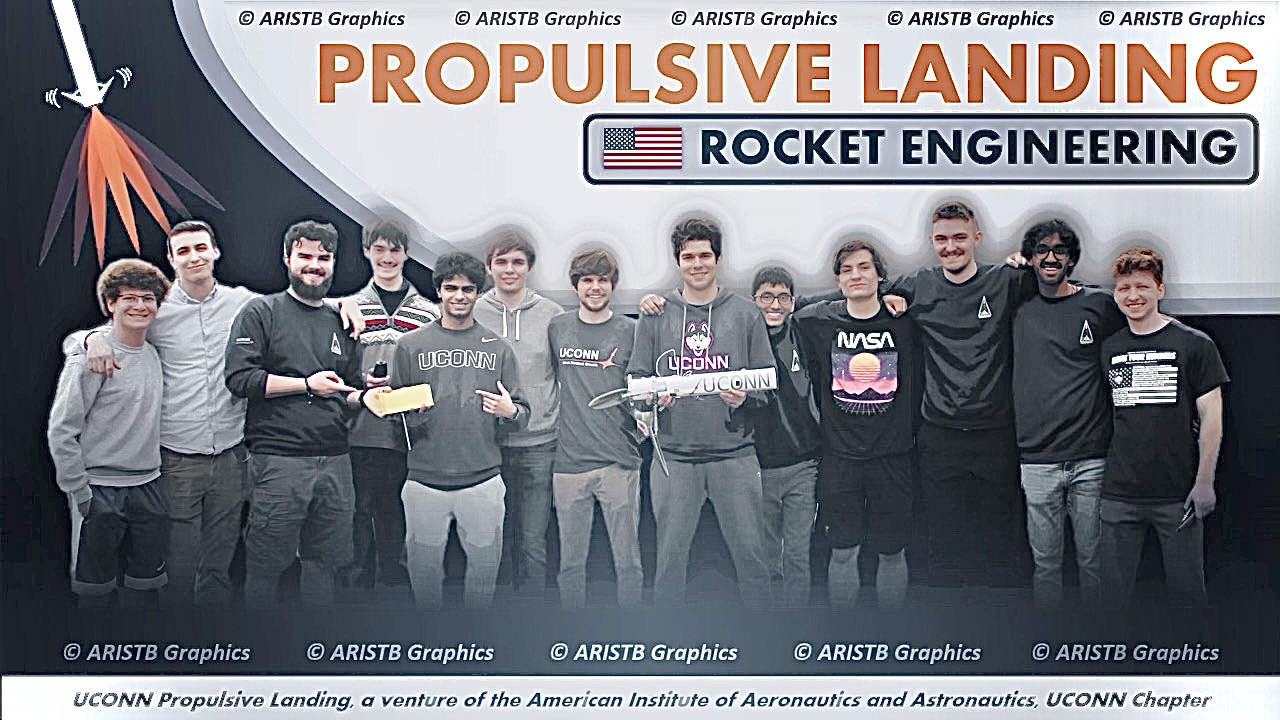
AIAA Rocketry: Propulsive Landing Project
Pinewood Derby Race Car
The competition was held on April 21st the P.J Werth Tower. Any team that incorporates an Arduino component onto their derby car can get a bonus on their design score for the project. I have an Arduino code that prints ‘Go Derby 2023 :D’ on a LCD screen that connects to the Arduino board. I borrowed the Arduino board from the OPIM Innovate lab to help me complete the project. This project was for the UNIV 1810 class.
Submitted by: Anny Zheng, Computer Science


Fish Tank Livewell

3D Printed Catapult ENGR1000 Project
 In the OPIM Innovate lab, I was able to create a catapult for a project in my ENGR1000 class. OPIM Innovate has all of the resources necessary to prototype, print, and assemble a project such as this. The necessary Solidworks skills I used for this project can be learned through the Tech Tracks that the lab offers. The 3D printers available in the lab are also great to test out your prototype in the real world. While my first design for the project worked out on paper, I was able to make improvements to it by seeing the real physical thing after printing it out on the Prusa MK3. OPIM Innovate is a great space with a lot of tools along with very helpful and informative staff to help increase your knowledge.
In the OPIM Innovate lab, I was able to create a catapult for a project in my ENGR1000 class. OPIM Innovate has all of the resources necessary to prototype, print, and assemble a project such as this. The necessary Solidworks skills I used for this project can be learned through the Tech Tracks that the lab offers. The 3D printers available in the lab are also great to test out your prototype in the real world. While my first design for the project worked out on paper, I was able to make improvements to it by seeing the real physical thing after printing it out on the Prusa MK3. OPIM Innovate is a great space with a lot of tools along with very helpful and informative staff to help increase your knowledge.
Submitted by: Anthony Prior
SQL Projects Coming Soon
1Stay tuned
